Part I: Form Sync to Async to As-Sync
The objective is to implement a simple TCP Echo Server that accepts TCP incoming connections and simply echoes anything that is sent to it.
We start off with a very simple, synchronous implementation and use that to motivate the use of asynchronous operations, which is what ASIO is all about.
Finally, we escape callback hell by introducing C++20 Coroutines.
Synchronous
echo_sync.cpp
Let’s start off simple: Introduce the io_context and acceptor classes and how to create a simple TCP listening socket accepting incoming connections.
#include <boost/asio.hpp>
using namespace boost::asio;
using ip::tcp;
void session(tcp::socket socket)
{
std::array<char, 64 * 1024> data;
for (;;)
{
boost::system::error_code ec;
std::size_t n = socket.read_some(buffer(data), ec);
if (ec == error::eof)
return;
write(socket, buffer(data, n));
}
}
void server(tcp::acceptor acceptor)
{
for (;;)
session(acceptor.accept());
}
int main()
{
io_context context;
server(tcp::acceptor{context, {tcp::v6(), 55555}});
}
What’s wrong here?
Warning
This code can handle only one connection at a time!
Synchronous (with threads)
To solve the problem, we can simply start a new thread for each accepted connection:
void server(tcp::acceptor acceptor)
{
for (;;)
std::thread(session, acceptor.accept()).detach(); // was: session(a.accept());
}
Now the echo server is capable of handling multiple connections in parallel. A new thread is created for each connection.
Warning
Spawning a thread per connection is slow and does not scale!
Asynchronous
So, spawning a new thread for each connection does not scale. So what can we do instead? Blocking a thread to wait for something to happen is not an option any more.
Enter the world of Asynchronous Operations. Instead of using their sync counterparts, we now have async_accept. In the echo loop, it is async_read_some and async_write_some.
echo_async
main()
int main()
{
boost::asio::io_context context;
server server(tcp::acceptor{context, {tcp::v6(), 55555}});
context.run();
}
Server
class server
{
public:
explicit server(tcp::acceptor acceptor)
: acceptor_(std::move(acceptor))
{
do_accept();
}
private:
void do_accept()
{
acceptor_.async_accept([this](error_code ec, tcp::socket socket)
{
if (!ec)
std::make_shared<session>(std::move(socket))->start();
do_accept();
});
}
tcp::acceptor acceptor_;
};
Session
class session : public std::enable_shared_from_this<session>
{
public:
explicit session(tcp::socket socket) : socket_(std::move(socket)) {}
void start() { do_read(); }
private:
void do_read()
{
auto self(shared_from_this());
socket_.async_read_some(buffer(data_),
[this, self](error_code ec, std::size_t length)
{
if (!ec)
do_write(length);
});
}
void do_write(std::size_t length)
{
auto self(shared_from_this());
boost::asio::async_write(socket_, buffer(data_, length),
[this, self](error_code ec, std::size_t /* length */)
{
if (!ec)
do_read();
});
}
tcp::socket socket_;
std::array<uint8_t, 64 * 1024> data_;
};
The control flow can be visualized like this:
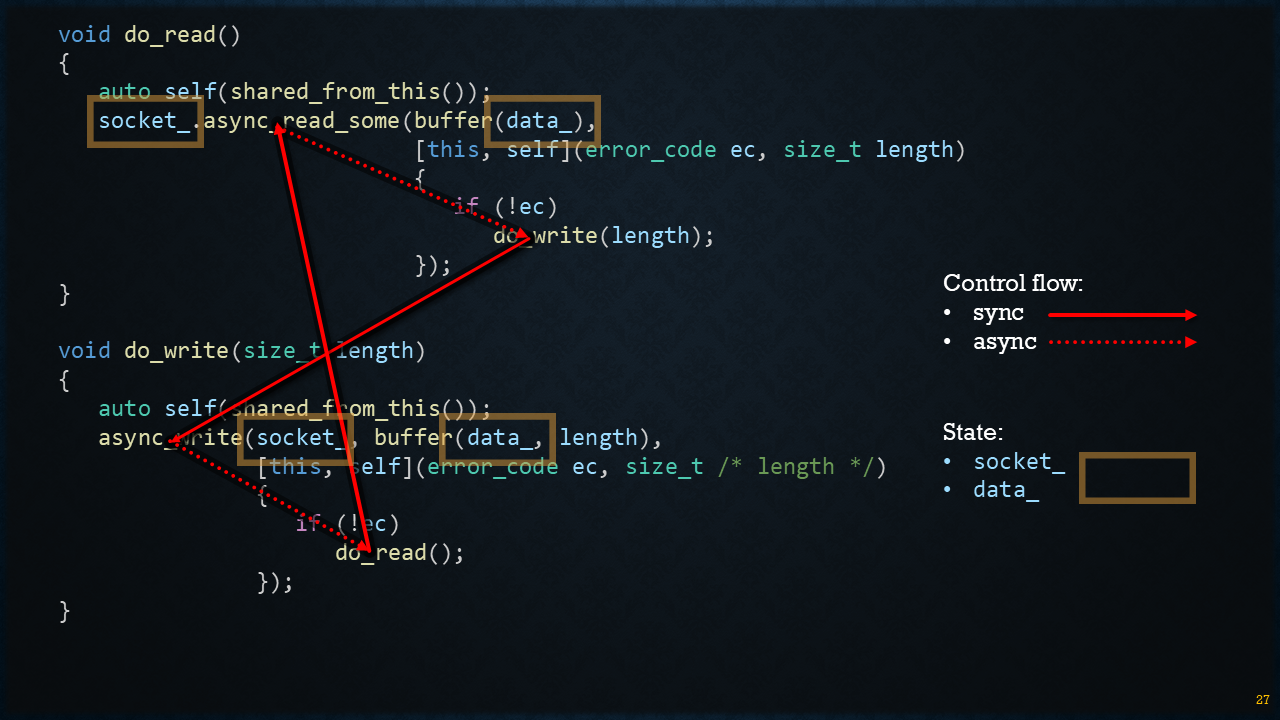
Also note that the session state is maintained as class members (socket_ and data_).
As-Synchronous (Coroutines)
Modern implementations using C++20 coroutines (co_await / awaitable) with Asio’s awaitable primitives. Key points:
Offers sequential-style code while remaining non-blocking.
Removes much of the boilerplate and state-machine complexity of callbacks.
Can be run single-threaded or on a multi-threaded io_context.
Typically uses asio::awaitable and use_awaitable completion token (or similar) provided by the Asio variant used in this project.
#include <boost/asio.hpp>
using namespace boost::asio;
using ip::tcp;
awaitable<void> session(tcp::socket socket)
{
std::array<char, 64 * 1024> data;
for (;;)
{
size_t n = co_await socket.async_read_some(buffer(data));
co_await async_write(socket, buffer(data, n));
}
}
awaitable<void> server(tcp::acceptor a)
{
for (;;)
co_spawn(a.get_executor(), session(co_await a.async_accept()), detached);
}
int main()
{
io_context context;
co_spawn(context, server({context, {tcp::v6(), 55555}}), detached);
context.run();
}